



Gyda datblygiad parhaus awtomeiddio logisteg a deallusrwydd, nid yw mentrau bellach yn gyfyngedig i uwchraddio a thrawsnewid un llinell gynhyrchu neu warws yn awtomatig. Felly, mae logisteg y planhigyn cyfan yn cyflymu, ac mae oes logisteg fawr yn dod. Fodd bynnag, yn y patrwm marchnad robot symudol presennol, oherwydd diffyg datblygiad y diwydiant, mae'n anodd iawn i wneuthurwr sengl gwblhau busnes cyffredinol llinell gynhyrchu, storio a warws ochr llinell yn annibynnol. Felly, mae'r cyfuniad o fertigol a llorweddol wedi dod yn ddewis strategol llawer o weithgynhyrchwyr robotiaid symudol ar hyn o bryd.

Y cydweithrediad strategol rhwng HEGERLS a Hairou mewn arloesi
Yn ystod y blynyddoedd diwethaf, cyhoeddodd Hebei Walker Metal Products Co, Ltd (brand hunan-berchnogaeth: HEGERLS) a Hairou Innovation gydweithrediad strategol, a lansiodd ar y cyd y dechnoleg ddiwydiannol gyntaf laser SLAM bin aml-haen yn codi robot AGV, gan greu'r partner gorau ar gyfer warws ochr llinell y ffatri, gan agor cyfnod newydd o drin diwydiannol, a galluogi uwchraddio diwydiant logisteg deallus ar y cyd.

Ynglŷn â Hebei Walker Metal Products Co, Ltd [Brand eich hun: HEGERLS]
Wedi'i sefydlu ym 1996, mae Hebei Walker Metal Products Co, Ltd yn gwmni cynnar sy'n ymwneud â'r diwydiant silff yng Ngogledd Tsieina. Ym 1998, dechreuodd gymryd rhan mewn gwerthu a gosod offer warws a logisteg. Ar ôl mwy nag 20 mlynedd o ddatblygiad, mae wedi dod yn ddarparwr gwasanaeth integredig un-stop o warysau a logisteg sy'n integreiddio dylunio prosiectau warws a logisteg, cynhyrchu offer a chyfleusterau, gwerthu, integreiddio, gosod, comisiynu, hyfforddiant personél rheoli warws, ar ôl - gwasanaeth gwerthu, ac ati, ac mae hefyd yn fenter uwch-dechnoleg sy'n canolbwyntio ar gynhyrchu deallus a logisteg deallus. Mae ei fusnes yn cynnwys silffoedd warysau: raciau gwennol Silff trawst croes, silff warws stereosgopig, silff atig, silff llawr, silff cantilifer, silff symudol, silff rhugl, silff gyrru, silff disgyrchiant, silff canolig, silff drwchus, llwyfan dur, gwrth-cyrydu silff, ac ati; Warws stereosgopig storio: warws stereosgopig gwennol, warws stereosgopig trawst, warws stereosgopig atig, warws stereosgopig math llawr, warws stereosgopig cantilifer, warws stereosgopig symudol, warws stereosgopig rhugl, gyriant mewn warws stereosgopig, warws stereosgopig disgyrchiant, ac ati; Offer storio deallus: car gwennol, car gwennol dwy ffordd, car gwennol pedair ffordd, pentwr, is-brif gar, elevator, system cludo a didoli deallus, blwch trosiant, paled, cawell storio, rheolydd AMB cyffredinol, fforch godi awtomatig, ac ati; System ac atebion warws a storio: tryc gwennol + fforch godi, tryc gwennol + stacer, is-fws + elevator, tryc gwennol pedair ffordd, pentwr AS/RS, system cludo a didoli deallus, meddalwedd system ddiwydiannol weledol a datrysiad gweledigaeth ddeallus, i ddarparu atebion a gwasanaethau un-stop ar gyfer cwsmeriaid ym mhob diwydiant, ac i hyrwyddo trawsnewid ac uwchraddio informatization diwydiannol, digideiddio a deallusrwydd.
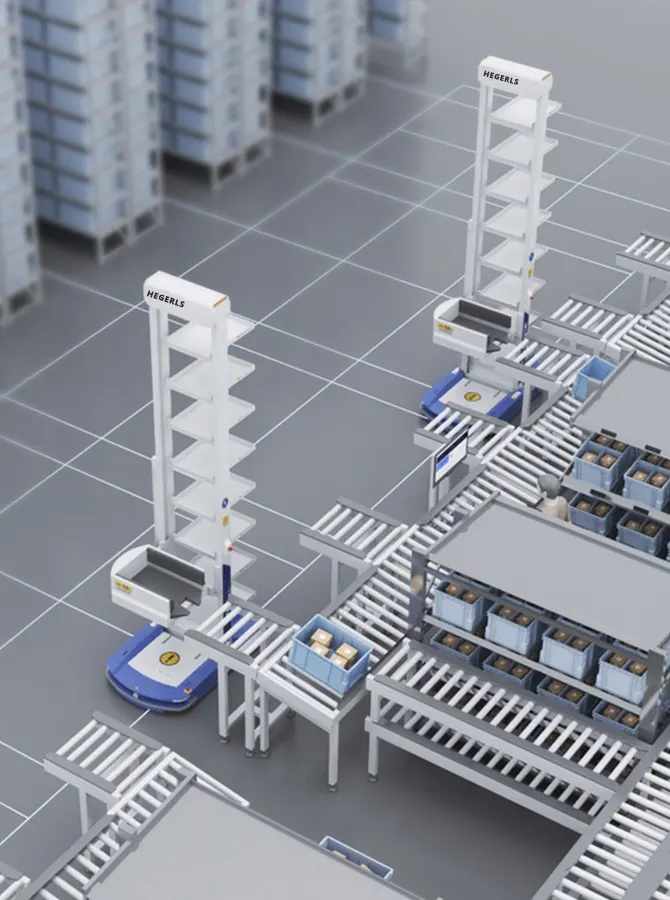
HEGERLS - laser SLAM bin aml-haen yn casglu robot AGV
Gall y dechnoleg ddiwydiannol gyntaf laser SLAM robot casglu AGV bin aml-haen, a ddatblygwyd ar y cyd gan HEGERLS a Hairou Innovation, wireddu llywio SLAM laser. Mae ganddo reolwr craidd SRC, ac mae ganddo bedwar uchafbwynt swyddogaethol. Mae'n integreiddio llywio, diogelwch, ac aml-swyddogaeth. Mae'n gwireddu docio hyblyg, casglu a gosod cywir, a thrin effeithlon. Mae'n dod yn bartner gorau warws ochr llinell y ffatri, gan alluogi gweithgynhyrchu deallus. Yn ystod y blynyddoedd diwethaf, mae'r robot newydd hwn wedi denu sylw mentrau mawr a chanolig, ac mae'r rhan fwyaf ohonynt wedi ei roi ar waith, sydd wedi cael ei ganmol a'i ffafrio yn unfrydol.
Gelwir SLAM (Lleoli a Mapio ar y Cyd) yn dechnoleg lleoli amser real ac adeiladu mapiau. Mae gan y robot swyddogaethau casglu a thrin deallus, llywio ymreolaethol, osgoi rhwystrau gweithredol a chodi tâl awtomatig. Mae'r laser SLAM yn sganio cyfuchlin yr amgylchedd i adeiladu map cwmwl pwynt o'r amgylchedd, ac yna'n cyfateb y map cwmwl pwynt adeiledig â'r cwmwl pwynt amser real a sganiwyd gan y laser ar gyfer lleoli a llywio. Mae'r dechnoleg ddiwydiannol laser SLAM deunydd aml-haen blwch dewis robot AGV cudd yn robot storio math blwch perfformiad uchel wedi'i integreiddio â meddalwedd a thechnoleg caledwedd uwch. Mae wedi'i gynllunio'n arbennig ar gyfer senarios warws ochr llinell, ac mae'n defnyddio technoleg llywio SLAM laser i sicrhau lleoliad cywir. Gall y dechnoleg ddiwydiannol laser SLAM blwch deunydd aml-haen sy'n casglu robot AGV cudd symud ymlaen ac yn ôl, a gall gylchdroi i unrhyw ongl yn y fan a'r lle. Ar yr un pryd, mae ganddo nodweddion sefydlogrwydd uchel a gweithrediad manwl uchel. Gall y modiwl osgoi rhwystrau diogelwch perffaith a mesurau amddiffyn diogelwch gweithredol a goddefol y robot sylweddoli gwahanu dyn a pheiriant. Pan fydd pobl yn mynd i mewn i ardal y robot yn ddamweiniol, gallant hefyd adnabod, dychryn a gwireddu amddiffyniad diffodd yn ddeallus. Yn ogystal, mae'r system feddalwedd yn cyd-fynd â'r dechnoleg ddiwydiannol laser SLAM aml-haen bin casglu robot AGV cudd yn gallu ymdrin â'r anghenion a gyhoeddir gan systemau cysylltiedig â busnes, sy'n hynod o addas ar gyfer rheolaeth hyblyg o warysau ochr llinell. Mae'r system feddalwedd yn prosesu ac yn casglu gwybodaeth ddeunydd yn awtomatig trwy gydol y broses gyfan, yn gweithredu'r cyfarwyddiadau derbyn a chludo, casglu a dosbarthu yn gywir ac yn effeithlon, yn gwireddu rheolaeth ddeallus y warws ochr llinell, yn sylweddoli bod nwyddau'n cael eu casglu'n drefnus o'r warws a'r storio sypiau nwyddau yn gywir, ac yn helpu cwsmeriaid i gyflawni cynhyrchiant main.

HEGERLS - mae robot AGV casglu biniau aml-haen laser SLAM yn canolbwyntio ar ddatrys pwyntiau poen storio
❑ Dyluniad dynol iawn
Mae'r dechnoleg ddiwydiannol laser SLAM blwch deunydd aml-haen sy'n casglu robot AGV cudd yn mabwysiadu dyluniad goruwchddynol i gyflawni codiad rhad ac am ddim o 0.4 m ~ 1.86 m, addasu i ddull gweithredu â llaw, cyfateb uchder gweithredu lluosog yn hyblyg, creu profiad gweithredu cyfforddus, a gwneud dynol- rhyngweithio cyfrifiadurol yn fwy cyfeillgar.
❑ Defnydd hynod hyblyg
Gan ymateb i'r amgylchedd gwaith newidiol, mae'r dechnoleg ddiwydiannol laser SLAM bin aml-haen sy'n casglu robot AGV cudd yn addasu i newid hyblyg y safle gweithredu, heb lywio cod dau ddimensiwn, yn torri trwy'r cyfyngiadau llinell cynulliad traddodiadol, ac yn gwireddu gweithgynhyrchu arwahanol a hyblyg galluogi gweithgynhyrchu deallus.
❑ Tocio hyblyg iawn
Mae busnes y ffatri yn gymhleth ac yn amrywiol, ac mae'r galw am offer logisteg hefyd yn wahanol. Gall y dechnoleg ddiwydiannol laser SLAM bin aml-haen sy'n casglu robot AGV cudd docio'n hyblyg gydag amrywiaeth o offer, gan gynnwys rholer, silff, AGV cudd, gweithfan artiffisial a llwyfannau gweithredu eraill, y gellir eu cymryd a'u gosod yn rhydd, a gellir eu tocio'n anfeidrol. ag y dymunwch, gydag ystod ehangach o senarios cymhwyso.
❑ Cymryd a lleoli hynod fanwl gywir
Mae system cymorth robot bin aml-haen laser SLAM wedi'i chysylltu, a defnyddir AI gweledol i gyflawni casglu a gosod cywir, casglu a thrin deunyddiau yn ddeallus, a helpu i weithredu'n hynod effeithlon.
❑ Hunan drin
Mae siasi'r dechnoleg ddiwydiannol laser SLAM aml-haen bin casglu robot AGV cudd yn meddu ar olwynion gyrru ac olwynion gyrru. Mabwysiadir y modd gwahaniaethol olwyn ddeuol, sy'n ffafriol i'r robot yrru a newid lôn mewn mannau cul. Gall y robot symud ymlaen ac yn ôl yn gyflym, a gall hefyd gylchdroi a newid cyfeiriad ar unrhyw ongl yn y lle gwreiddiol. Mae'r laser diwydiannol gwyddoniaeth a thechnoleg SLAM aml-haen blwch deunydd pigo AGV cudd robot yn dilyn y cyfarwyddiadau trin a cherdded a gyhoeddwyd gan y system amserlennu cyfrifiadur, gall addasu cyflymder rhedeg, cyfeiriad, brecio, ac ati, ac yn cefnogi adrodd y statws cerdded i'r system amserlennu, er mwyn cyflawni triniaeth ymreolaethol di-griw. Gall mecanweithiau diogelwch lluosog y robot ei hun sicrhau diogelwch personél a robotiaid yn y broses o drin ymreolaethol.
❑ Hunan godi tâl
Gall y dechnoleg ddiwydiannol laser SLAM blwch deunydd aml-haen casglu robot AGV cudd wireddu'r swyddogaeth hunan-godi tâl. Pan fydd pŵer y robot bron wedi dod i ben, mae'r llais yn awgrymu nad yw'r pŵer yn ddigonol, a bydd y robot yn cerdded yn awtomatig i'r safle pentwr gwefru yn ôl y gorchymyn a gyhoeddwyd gan y system anfon. Mae porthladd codi tâl y robot wedi'i gysylltu'n llwyddiannus â'r pentwr codi tâl i ddechrau codi tâl. Mae gan y robot gylched amddiffyn codi tâl adeiledig i sicrhau ei fod yn codi tâl yn ddiogel. Ar ôl ei wefru'n llawn, bydd y robot yn rhoi'r gorau i godi tâl yn awtomatig.

❑ Diogelu diogelwch
Mae gan y dechnoleg ddiwydiannol laser SLAM aml-haen blwch deunydd dewis robot AGV cudd swyddogaethau amddiffyn diogelwch lluosog i sicrhau gweithrediad diogel a dibynadwy personél a'r system gyfan.
❑ Llywio hynod ddiogel
Mae'r robot AGV cudd laser gwyddoniaeth a thechnoleg ddiwydiannol SLAM yn cael ei adeiladu gyda rheolydd SRC a ddatblygwyd gan Xiangong Intelligence, sy'n darparu swyddogaethau sylfaenol i'r robot fel adeiladu mapiau, lleoli, llywio, amserlennu aml-beiriant, codi tâl awtomatig, rhwystr 3D osgoi, ac ati, yn sylweddoli mordwyo hynod ddiogel, yn amddiffyn diogelwch gweithwyr, ac yn addas ar gyfer amgylchedd maes cymysg dyn-peiriant cymhleth, sy'n fwy deallus ac effeithlon.
❑ Larwm clywadwy a gweledol ac ysgogiad llais
Mae'r dechnoleg ddiwydiannol laser SLAM aml-haen bin casglu robot AGV cudd yn darparu swyddogaeth larwm clywadwy a gweledol, a gall defnyddwyr wybod statws gweithrediad y robot mewn amser real trwy'r wybodaeth larwm clywadwy a gweledol.
❑ Diogelu diogelwch mewn arosfannau brys
Er mwyn sicrhau diogelwch y robot a'r gweithredwyr, mae gan y corff robot bedwar botwm atal brys, sydd yn y drefn honno ym mlaen chwith a chefn dde'r gragen siasi, ac ar ddwy ochr y colofnau codi chwith a dde. Gall amddiffyniad diogelwch stop brys wneud y mwyaf o ddiogelwch personél ac offer mewn amrywiol argyfyngau. Pwyswch y botwm stopio brys i sbarduno'r amddiffyniad diogelwch stop brys, a chylchdroi'r botwm clocwedd i ailosod y botwm stopio brys.
❑ Amddiffyniad codi
Defnyddir y ddyfais cyd-gloi electromecanyddol gwrth-gostwng codi, sydd wedi'i lleoli o dan y golofn codi ar ochr dde'r robot, i atal y codi a chwympo pan fydd y personél cynnal a chadw yn ailwampio'r robot. Pan fydd y switsh codi gwrth-syrthio yn cael ei droi i'r sefyllfa "cloi codi", mae'r mecanwaith codi robot yn mynd i mewn i'r cyflwr cloi, mae'r mecanwaith codi yn stopio, ac mae'r cylched trydanol yn cael ei dorri i ffwrdd i ddarparu amddiffyniad diogelwch deuol. Pan fydd y switsh codi gwrth-syrthio yn cael ei dynnu i'r gêr “datgloi codi”, mae'r modur codi yn ailddechrau gweithredu codi arferol. Pan fydd y personél cynnal a chadw yn cyflawni gwaith cynnal a chadw arferol a datrys problemau ar y robot, rhaid iddynt droi'r switsh codi gwrth-syrthio i'r sefyllfa "clo codi" i atal y fforc rhag cwympo ac amddiffyn diogelwch personél.
❑ Amddiffyn rhag gwrthdrawiadau
Mae ymylon blaen a chefn siasi'r dechnoleg ddiwydiannol laser SLAM yn casglu robot AGV cudd aml-haen yn y drefn honno â chysylltiadau diogelwch ar gyfer amddiffyn y robot rhag gwrthdrawiad, a all amddiffyn diogelwch y robot a'r personél yn effeithiol. Pan fydd y rhwystr yn is nag uchder canfod y modiwl osgoi rhwystrau radar laser, gall daro cyswllt diogel y robot. Wrth daro rhwystr, mae'r cyswllt diogelwch yn cael ei wasgu ac anfonir gwybodaeth i'r gylched reoli, ac mae'r robot brys yn brecio ac yn mynd i mewn i'r modd amddiffyn diogelwch. Ar yr adeg hon, mae'r golau coch uchaf ymlaen am amser hir, mae goleuadau dangosydd blaen a chefn y siasi ymlaen, ac mae'r swnyn yn anfon sain larwm diferu parhaus, ynghyd ag anogwr llais.
❑ Cyfathrebu rhwydwaith
Mae'r dechnoleg ddiwydiannol laser SLAM aml-haen bin casglu robot AGV cudd yn cefnogi Wi Fi neu 5G a dulliau cyfathrebu eraill. Gellir ei gysylltu â'r llwyfan rheoli deallus trwy rwydwaith diwifr, a all fonitro statws gwaith a statws iechyd y robot mewn amser real. Pan fydd eithriad yn digwydd, mae'r robot yn adrodd am y wybodaeth eithriad i'r llwyfan rheoli deallus trwy'r rhwydwaith, a gall technegwyr ddatrys y broblem yn ôl y log eithriad a gwybodaeth arall.
❑ Rheolaeth ddeallus
Mae technoleg ddiwydiannol laser SLAM aml-haen yn casglu robot AGV cudd yn robot hynod ddeallus sy'n cefnogi mynediad i'r llwyfan rheoli deallus a llwyfan rheoli trydydd parti. Y llwyfan rheoli deallus yw ymennydd deallus y robot, a all gysylltu â'r system reoli allanol, prosesu prosesau busnes perthnasol, cynnal dadansoddiad data a rheolaeth weledol; Sicrhau amserlennu robotiaid lluosog ac offer logisteg amrywiol mewn amser real, gwireddu rhagfynegiad a monitro iechyd y system, a gwneud y gorau o'r system yn seiliedig ar ddysgu atgyfnerthu a dysgu manwl. Gall y llwyfan rheoli deallus wireddu warysau deallus, warysau a gweithrediadau eraill. Dim ond ar y rhyngwyneb meddalwedd y mae angen i'r gweithredwr glicio ar y botwm gweithredu, a bydd y robot yn cwblhau tasgau amrywiol y gorchymyn yn annibynnol o dan y system amserlennu.
Bydd y robot bin aml-haen laser SLAM cyntaf a lansiwyd ar y cyd gan HEGERLS a HAIROO Innovation yn chwarae rhan sylweddol wrth drin ochr y llinell, yn cyflawni tocio hyblyg rhwng offer cynhyrchu a gweithredu biniau'n effeithlon, ac yn creu mwy o werth i gwsmeriaid. Ar yr un pryd, yn y strategaeth gydweithredu arloesol rhwng HEGERLS a HAIROO, mae HEGERLS hefyd wedi cyflwyno sawl math o robotiaid Kubao: robot bin aml-haen HEGERLS A42, robot bin dyfnder dwbl HEGERLS A42D, robot casglu carton HEGERLS A42N, robot bin codi telesgopig HEGERLS A42T, yn cwmpasu'n raddol amrywiaeth o senarios cais o robotiaid storio blychau, gan ganolbwyntio ar ddatrys mwy o bwyntiau poen storio, a darparu cynyddiad mwy o werth i gwsmeriaid. Yn y dyfodol, bydd y ddwy ochr yn parhau i archwilio mwy o bosibiliadau gweithgynhyrchu deallus a warysau deallus i gyflawni datblygiad cyffredin.
Amser postio: Nov-02-2022